ภาคนี้เป็นหัวในหลักของหุ่นยนต์ เพราะเป็นตัวประมวลผลและสั่งการ เราสามารถที่จะทำให้หุ่นของเรามีสมองสามารถคิด และตัดสินใจ ควบคุม รักษาสภาพตัวเอง และทำงานต่าง ๆ ตามที่ออกแบบไว้ เองได้ โดยใช้การรับรู้จากภาค เซนเซอร์ นั้นเอง เมื่อประมวลผลแล้วก็จะส่งไปควบคุมอุปกรณ์ เมคคานิค ต่าง ๆ ด้วยสัญญาณดิจิตอล โดยความสามารถที่จะคิดและตัดสินใจเราจะเป็นคนตั้งเงื่อนไขให้แก่มัน หรือ การเขียนโปรแกรมนั้นเอง เช่น ถ้า เซนเซอร์ ตรวจเจอวัตถุให้เข้าชน ถ้าตรวจเจอเส้นสีขาวให้ถอยหลัง เป็นต้น ขึ้นอยู่กับการออกแบบระบบของเรา
โดยในปัจจุบันมีตัวคอนโทรนให้เลือกมากมายแต่ สำหรับหุ่นยนต์ทั่วไปจะมีขั้นตอนการประมวลผลน้อย ไม่ยุ่งยากซับซ้อนมากนัก เราจึงนิยมใช้ ไมโครคอนโทรนเลอร์ เช่น PIC MCS-51 AVR เป็นต้น แต่สำหรับหุ่นยนต์ที่มาการประมวลผลมาก ซับซ้อน เช่นหุ่นที่ใช้งานในโรงงานอุตสาหกรรม ก็จะใช้คอนโทรนตัวที่มีความสามารถเพิ่มขึ้น เช่น PLC หรือเครื่อง PC โดยจะมีข้อเสียเปรียบและได้เปรียบแตกต่างกันไป เช่น หน่วยความจำ ความสามารถในการประมวลผล ความเร็วในการประมวลผล ความยากง่ายในการเขียนโปรแกรม หรือเนื้อที่ในการติดตั้ง ก็ควรจะเลือกใช้ให้เหมาะสมกับงาน
วงจรอิเล็กทรอนิกส์หรือบางครั้งจะเรียกว่า หุ่นยนต์บีม จะใช้อุปกรณ์และวงจรอิเล็กทรอนิกส์ที่ไม่ซับซ้อน ทำงานง่ายๆ ไม่ต้องเขียนโปรแกรมควบคุม
ตัวอย่างวงจร ตัวอย่างหุ่น
ตัวอย่างหุ่น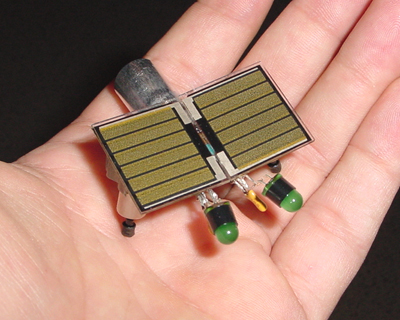 วงจรไมโครคอนโทรลเลอร์
วงจรไมโครคอนโทรลเลอร์งานที่มีความซับซ้อนในการคำนวณ มีตัวแปรอินพุตเข้ามาให้พิจารณา หลาย ๆ ตัว มีการตัดสินใจในหลาย ๆ เงื่อนไข มีการนับ มีการเก็บค่า ต่าง ๆ ไว้เพื่อพิจารณา ระบบจะเป็นระบบที่ใหญ่ ยุ่งยาก ซับซ้อน เป็นอย่างมาก แต่ถ้าเราเลือกใช้การควบคุม ด้วย คอนโทรเลอร์ ก็จะง่ายขึ้น เพราะ ไมโครคอนโทรนเลอร์ คือชื่อของอุปกรณ์อิเล็กทรอนิกส์แบบหนึ่งที่รวมเอาหน่วยประมวลผล หน่วยคำนวณทางคณิตศาสตร์และลอจิก มีวงจรรับสัญญาณอินพุต วงจรขับสัญญาณเอาต์พุต หน่วยความจำ วงจรกำเนิดสัญญาณนาฬิกาไว้ด้วยกัน ทำให้สามารถนำไปใช้งานแทนวงจรอิเล็กทอรนิกส์ที่ซับซ้อน ได้เป็นอย่างดี ช่วยลดจำนวนอุปกรณ์และขนาดของระบบ ในขณะที่มีขีดความสามารถสูงขึ้น
เราจะใช้โปรแกรม (จะขอกล่าวภายหลัง) บนคอมพิวเตอร์ PC นี้แหละครับ เขียน เงื่อนไขการตัดสินใจ การนับ การเก็บค่า คิดคำนวณสมการที่ยาก ๆ ต่าง ๆ มาเขียนตามหลักการ ที่เราเรียกว่าการเขียนโปรแกรมนั่นเองครับ สำหรับการเขียนโปรแกรมก็ มีภาษาสำหรับการเขียน ซึ่งมีให้เราเลือกศึกษา เยอะแยะ มากมายครับ เช่น แอสแซมบลี ภาษาเบสิค หรือ ภาษาซี เราก็ เขียน โปรแกรมตามหลักการเขียนของแต่ละ ภาษา ซึ่งจะมีหนังสือให้เราศึกษาหลักการเขียน คำสั่งที่ใช้ในการเขียนมากมาย (ในโครงงานนี้จะใช้ ภาษาซี ซึ่งจะกล่าวหลักการพื้นฐานให้) เมื่อเราเขียนเสร็จให้เราเข้าใจว่าโปรแกรมจะทำการออกแบบลอจิกให้เราเองโดย อัตโนมัติ โดยจะสร้างไฟด์ ใหม่ขึ้นมา หลังจากนั้น เราจะนำไฟด์ที่ได้นี้ โหลดลงให้กับ ตัวชิปคอนโทรนเลอร์ครับ และให้เราเข้าใจว่า ตัวชิปจะสร้าง วงจรลอจิกตามที่เราออกแบบไว้ โดยการเขียนโปรแกรมนั้นเองครับ ก็ คือแทนที่เราจะมากออกแบบวงจรลอจิก ตั้งสมการ ลดรูปสมการและต่อวงจร เราก็ไม่ต้องคิดมาก แค่เขียนโปรแกรม คอมพิวเตอร์ก็จะออกแบบให้เราเอง
ตัวอย่างหุ่น
 วงจรไมโครโปรเซสเซอร์
วงจรไมโครโปรเซสเซอร์หรือใช้คอมพิวเตอร์ในการควบคม เหมาะสำหรับงานที่ต้องการการประมวลผลสูง
ตัวอย่างหุ่น


