การทำให้หุ่นยนต์เดินได้ โดยไม่ต้องใช้โปรแกรม ง่ายกว่าทึ่คิด เพียงแค่ศึกษาเคล็ดลับสักนิด จะรู้คำตอบ 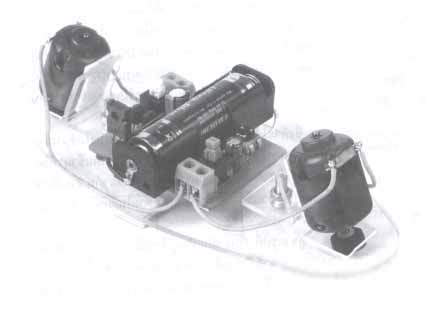 หุ่นยนต์เคลื่อนที่อย่างไร
หุ่นยนต์เคลื่อนที่อย่างไร จากนิตยสาร Hobby Electronics ปีที่ 11 ฉบับที่ 123 ก.ย.. 2545
เรามาดูการทำงานของตัวหุ่นยนต์ก่อนนะครับว่าจะทำงานได้อย่างไรในรูปทรงที่แปลก ๆ ดูในรูปที่ 1 จะเห็นว่าหุ่นยนต์เคลื่อนที่ไปในลักษณะหมุนตัวตามขอบผนังที่ขวางกั้น เรามาเจาะลึกถึงประเด็นของการทำงานเลยดีกว่าครับ
ในตัวหุ่นยนต์จะประกอบด้วยมอเตอร์ไฟตรง 2 ตัว (ใช้มอเตอร์ DC ทั่วไปหาได้จากร้านขายรถแข่ง รถกระป๋อง) โดยที่แกนของมอเตอร์จะใส่ล้อซึ่งทำจากลูกยางเทป หุ่นยนต์ตัวนี้สามารถที่จะวิ่งหาทางออกจากสิ่งกีดหขวางเช่นเขาวงกตได้เอง หรือบริเวณใด ๆ ก็ได้ที่มีขอบทางให้หุ่นยนต์สามารถวิ่งได้
มอเตอร์จะถูกติดตั้งที่ส่วนท้ายทั้ง 2 ด้าน เมื่อเราเปิดสวิตซ์เริ่มเดินในรูปที่ 1(ก) มอเตอร์ตัวที่ 1 จะหยุดทำงานเพระาขอบท้ายของตัวหุ่นยนต์ติดกับขอบผนัง จึงทำให้มีแรงขับเคลื่อนสูงสู่มอเตอร์ตัวที่ 2 ที่เป็นอิสระ ทำให้มอเตอร์ 2 ทำงานเพียงตัวเดียวในขณะนั้น เมื่อมอเตอร์ตัวที่ 2 ทำงาน จะผลักในส่วนท้ายที่ 2 ของหุ่นยนต์ทำให้เกิดแรงเหวี่ยงไปตามทิศทางของลูกศรและมอเตอร์ 2 จะวิ่งไปจนเกือบจะถึงกำแพง ดังรูปที่1 (ข) มอเตอร์ 1 จะเป็นอิสระจากการหมุนของมอเตอร์ 2 ทำให้หุ่นยนต์ถึงขอบกำแพงเร็วขึ้น และก็จะกลับสู่รูปแบบเดิม คือ มอเตอร์ตัวที่ 2 จะหยุด ทำให้กิดแรงหมุนของมอเตอร์ 1 ที่รุนแรงจึงเกิดการเหวี่ยงที่ส่วนท้ายที่ 1 ไปตามทิศทางของแนวลูกศร ดังรูปที่ 1(ค) เข้าสู่กำแพงอีกและจะเป็นเช่นนี้ไปเรื่อย ๆ
เหตุการณ์ต่างๆ ที่กล่าวนี้ คือหลักการเดินของหุ่นยนต์ตัวนี้ครับนอกจากนั้นหุ่นยนต์ตัวนี้ยังสามารถเดิน เกาะขอบผนังที่ไม่ได้อยู่ในระดับเดียวกันอีกนะครับ ดังรูปที่ 1(จ) และรูปที่ 1(ฉ) ดังนั้นหากแนวผนังที่มีเส้นทางคดเคี้ยวเป็นเขาวงกต เจ้าROTOR1 ตัวนี้จะตะลุยแหลกแหกด่านได้สบาย เมื่อพี่ ๆ น้อง ๆ อ่านมาถึงจุดนี้แล้ว เราลองมาทำของเล่นชิ้นนี้กันเลยดีกว่าครับ
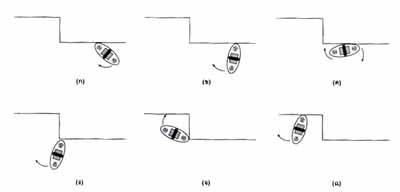 รูปที่ 1 การเคลื่อนที่ของหุ่นยนต์
รูปที่ 1 การเคลื่อนที่ของหุ่นยนต์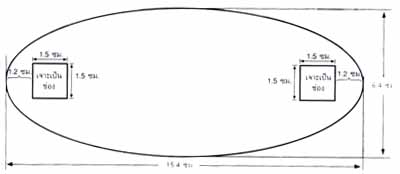 รูปที่ 2 ส่วนฐานของตัวหุ่นยนต์
รูปที่ 2 ส่วนฐานของตัวหุ่นยนต์ ในส่วนฐานดังในรูปที่ 2 จะใช้พลาสติกใสที่มีความหนา 2 มิลลิเมตร ตัดเป็นส่วนฐานโดยวัดและตัดตามแบบ ตัวฐานจะมีขนาดกว้าง 6.4 เซนติเมตร และยาว 15.4 เซนติเมตร ในส่วนปลายทั้ง 2 ด้าน ใช้วงเวียนวัดให้มีโครงร่างส่วนปลายดังในรูปที่ 3 ให้วัดจากส่วนปลายของทั้งสองด้านเข้ามาข้างละ 1.2 เซนติเมตร แล้วให้วาดกรอบสี่เหลี่ยมที่มีขนาดกว้าง 1.5 เซนติเมตร และยาว 1.5 เซนติเมตร เป็นรูปสี่เหลี่ยมจตุรัส
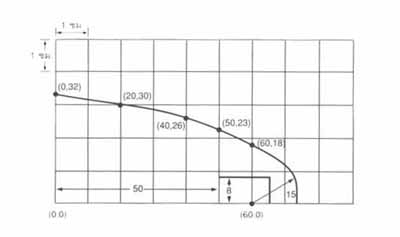 รูปที่ 3 แนวการตัดตรงปลายส่วนฐาน
รูปที่ 3 แนวการตัดตรงปลายส่วนฐาน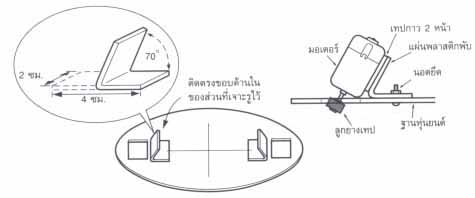 รูปที่ 4 ส่วนวางมอเตอร์
รูปที่ 4 ส่วนวางมอเตอร์ จากนั้นจะต้องเจาะเป็นช่องตามรูปเพี่อที่จะนำส่วนล้อของมอเตอร์มาวางตรงส่วนนี้ให้หุ่นยนต์สามารถวิ่งได้ ในรูปที่ 4 ส่วนนี้เราจะทำเป็นที่วางมอเตอร์ ซึ่งจะใช้พลาสติกขนากความหนา 2 มิลลิเมตร ตัดให้มีขนาดกว้าง 2 เซนติเมตร และยาว 3 เซนติเมตร พับให้มีมุม 70 องศา แล้วนำไปติดกับบริเวณส่วนฐานให้ชิดกับช่องที่ตัด
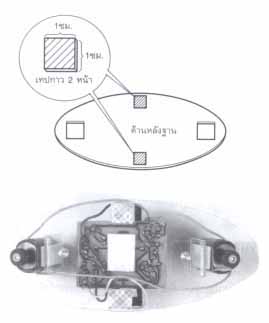 รูปที่ 5 ติดเทปกาว 2 หน้า สร้างจุดสมดุล
รูปที่ 5 ติดเทปกาว 2 หน้า สร้างจุดสมดุล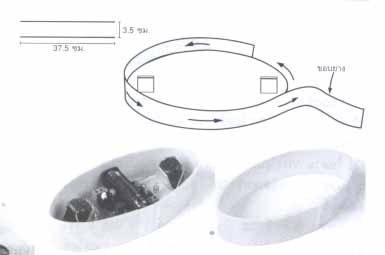 รูปที่ 6 ส่วนของขอบยาง
รูปที่ 6 ส่วนของขอบยาง ในรูปที่ 5 ส่วนนี้เราจะใช้เทปกาว 2 หน้า ตัดให้มีขนาดกว้าง 1 เซนติเมตร ยาว 1 เซนติเมตร แล้วนำไปติดบริเวณส่วนใต้ฐานทั้ง 2 ด้าน เพื่อสร้างความสมดุลให้กับฐาน ในรูปที่ 6 ส่วนนี้เราจะใช้แผ่นยางที่มีลักษณะเหมือนโฟมละเอียด (หาซื้อได้ตามร้านขายเครื่องเขียนทั่วไป) วัดให้มีขนาดกว้าง 3.5 เซนติเมตร ยาว 37.5 เซนติเมตร ตัดตามขนาดแล้วนำไปติดบริเวณโดยรอบขอบฐาน
หลักการทำงานวงจรการทำงานดังรูปที่ 7 เมื่อเราเริ่มกดสวิตซ์ S1 จะมีกระแสไหลผ่าน R2 เข้าไปไบอัสให้ทรานซิสเตอร์ Q2 ทำงานและทำให้มีกระแสจากขาคอลเล็กเตอร์ (C) ของ Q2 ไหลผ่านขาอิมิเตอร์ (E) ไปลงกราวด์ ซึ่งเกิดผลทำให้เสมือนเป็นการไบอัสให้กับทรานซิสเตอร์ Q3 ซึ่งทำให้กระแสไหลผ่านเข้าสู่มอเตอร์ทั้ง 2 ตัว ทำให้มอเตอร์หมุน
ขณะที่ทรานซิสเตอร์ Q3 ทำงานจะมีกระแสส่วนหนึ่งวิ่งเข้าสู่ทรานซิสเตอร์ Q1 โดยที่กระแสส่วนนี้จะเป็นกระแสป้อนกลับ เพื่อเป็นการควบคุมไบอัสให้ขาเบส (B) ของทรานซิสเตอร์ Q3 ในส่วน VR1 เป็นตัวต้านทานที่ใช้กำหนดกระแสไบอัสที่ขาเบสของทรานซิสเตอร์ Q1 เพื่อควบคุมความเร็วของมอเตอร์
ทรานซิสเตอร์ Q3 เป็นตัวขับมอเตอร์ 1 และ 2 เราสามารถกลับทิศทางของมอเตอร์ โดยใช้สวิตซ์ S2 การกดสวิตซ์นี้หมายถึง การที่หุ่นยนต์ของเราจะสามารถเดินหน้าหรือถอยหลังได้ตามที่เราต้องการ (ทวนเข็มนาฬิกาหรือตามเข็มนาฬิกา)
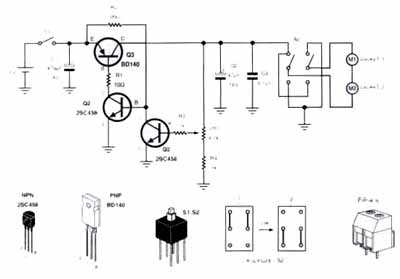 รูปที่ 7 วงจรการทำงานของหุ่นยนต์สามารถอ่านต่อเนื่องได้ที่.......... http://www.basiclite.com/robot/project/rotor1/rotor1.htm
รูปที่ 7 วงจรการทำงานของหุ่นยนต์สามารถอ่านต่อเนื่องได้ที่.......... http://www.basiclite.com/robot/project/rotor1/rotor1.htm


