| |
|
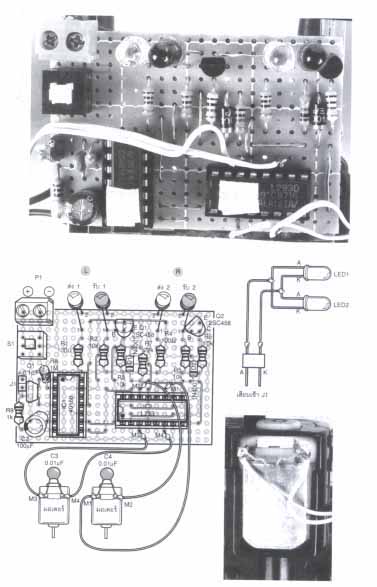 รูปที่ 12 การลงอุปกรณ์บนแผ่นวงจรพิมพ์
รูปที่ 12 การลงอุปกรณ์บนแผ่นวงจรพิมพ์
|
รายการอุปกรณ์
ตัวต้านทาน ขนาด 1/4
วัตต์ 5 %
R1,R4 - 100
2 ตัว
R2,R3,R5,R6 - 10k
4 ตัว
R7 - 22 k
1ตัว
R8 - 1M
1 ตัว
R9 - 1k 1
ตัว
ตัวเก็บประจุ
C1 - 0.1uf 50V เซรามิก 1
ตัว
C2 - 100uf 16V อิเล็กทรอไลท์ 1
ตัว
C3,C4 - 0.01uf 50V เซรามิก
2 ตัว
อุปกรณ์สารกึ่งตัวนำ
Q1,Q2 - ทรานซิสเตอร์เบอร์ 2SC458 2
ตัว
D1,D2 - ไอโอดเบอร์ 1N4001
2 ตัว
IC1 - ไอซีเบอร์ 40106
1 ตัว
IC2 - ไอซีเบอร์ 293 1
ตัว
ภาครับส่งอินฟราเรด
LED ส่งอินฟราเรด 2
ตัว
LED รับอินฟราเรด
2 ตัว
อื่น ๆ
LED1,LED2 2
ตัว
ซ็อกเกต 14 ขา 1
ตัว
ซ็อกเกต 16 ขา 1
ตัว
ลังถ่านน 2 ก้อน 1
ลัง
ลังถ่าน 1 ก้อน 1
ลัง
สวิตซ์ 2 ทาง 1
ตัว
ห้องเครื่องรถกระป๋อง 2
ชุด
ดวงตาปลอม
1 คู่
นอต 3 มิลลิเมตร ยาว 3 เซนติเมตร
2 ตัว
นอต 3 มิลลิเมตร ยาว 8 เซนติเมตร
2 ตัว
แผ่นพลาสติกตัดตามรูป
สายไฟ, เทปกาว2หน้า, แผ่นพาลามิเซี่ยม, ถ่านไฟฉาย |
| |
การทดสอบการทำงาน
หุ่นยนต์ของเราหัวใจจะอ่อนไหวหรือไม่นั้น
จะขึ้นอยู่กับการเปิดสวิตซ์นะครับ เมื่อเรากดสวิตซ์ลงไปพิจารณาสิ่งที่เกิดขึ้นต้องมีไฟติดกระพริบที่เขาทั้งสองข้างอย่างรวดเร็ว
และหุ่นยนต์เราต้องหยุดนิ่งไม่มีการเคลื่อนที่ใด ๆ ทั้งสิ้น
(ต้องทดสอบในที่โล่ง ไม่มีสิ่งกีดขวาง) ถ้ามีการเคลื่อนที่แสดงว่าต่อวงจรส่วนภาครับแสงหรือส่วนขับมอเตอร์ผิด
แต่ถ้าหยุดนิ่งแล้วทดสอบโดยการนำวัตถุค่อย ๆ ขยับเข้าหาด้านหน้าของตัวหุ่นยนต์
เมื่อเข้าไปใกล้ถึงจุด ๆ หนึ่งหุ่นยนต์จะถอยหลังทันที
เมื่อเราขยับวัตถุไปทางด้านซ้ายหรือทางด้านขวาหุ่นยนต์เราจะต้องคอยตามวัตถุเสมอ
หรือลองใช้มือแทนวัตถุมาบังแสงอินฟราเรดทั้ง 2 ข้าง จะทำให้หุ่นยนต์เดินถอยหลังดังในรูปที่
13
แต่ถ้าหุ่นยนต์ที่เราสร้างขึ้นไม่ขยับไปตามหลักการ
ให้ค่อย ๆ พิจารณาทีละส่วนจากภาคส่งอินฟราเรด ภาครับแสงอินฟราเรด
ส่วนที่เป็น OR GATE ส่วนขับมอเตอร์และการเดินสายไฟ ผมขอรับรองว่าต่อวงจรตามรูปที่ให้มาเราจะได้หุ่นยนต์หัวใจที่เคลื่อนไหวได้อย่างแน่นอน
ครับ! |
 รูปที่ 13 ใช้นิ้วและมือแทนวัตถุทดสอบหุ่นยนต์
รูปที่ 13 ใช้นิ้วและมือแทนวัตถุทดสอบหุ่นยนต์
|

