ลักษณะการทำงานของตัวไมโครคอนโทรเลอร์
ในการสั่งงาน รับข้อมูล ประมวลผล
ตัวไมโครคอนโทรเลอร์จะทำงานทั้งหมด ดังนั้นหลังจากที่เราได้ประกอบในส่วนของวงจรและประกอบตัวหุ่นเสร็จแล้ว
ก็จะมาเข้าศึกษาในส่วนของตัวโปรแกรมและการเขียนโปรแกรม จากที่กล่าวมาข้างต้นการที่เราใช้วงจรบูสแรงดันขึ้นนั้น
เมื่อนำมาต่อใช้งานกับตัวไมโครคอนโทรเลอร์และทำการเขียนโปรแกรมสั่งงานปรกตินั้นไม่สามารถที่ทำได้เพราะ
ในขณะที่มอเตอร์ทำงานพร้อมๆ กันทั้ง 2 ตัวจะเกิดการกินกระแสที่มากจน
วงจรบูสแรงดันไม่อาจที่จะรักษาระดับแรงดันให้คงที่ได้ เกิดเหตุการณ์แรงดันที่จ่ายให้ตัวไมโครคอนโทรเลอร์ตก
จนถึงจุดที่วงจรตรวจสอบแรงดันภายในตัวไมโครคอนโทรเลอร์(LVD) ตรวจจับแรงดันได้และทำการรีเซตตัวเองทันที
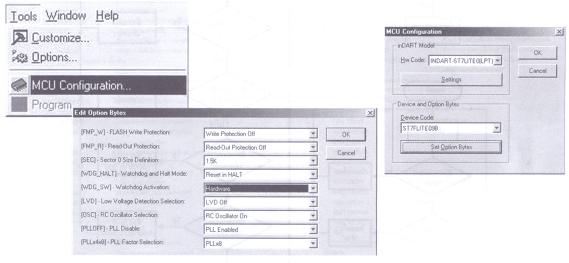
แต่ในแรงดันที่ตกนี้ ยังสามารถให้ตัวไมโครคอนโทรเลอร์ทำงานได้ เราจึงต้องทำการปิดการทำงานของวงจรตรวจจับแรงดัน(LVD)
และต้องเพิ่มเติมวงจรที่เรียกว่าWatchdogเข้าไปเพื่อทำการรีเซตตัวไมโครคอนโทรเลอร์เมื่อเกิดการแฮง
หรือ การปิดและเปิดเครื่องใหม่ ซึ่งวงจรWatchdogที่ใช้นี้เป็นคุณสมบัติพิเศษอย่างหนึ่งของตัวไมโครคอนโทรเลอร์เบอร์นี้
โดยวงจรWatchdogที่อยู่ภายในตัวไมโครคอนโทรเลอร์นี้สามารถมีวิธีการใช้
ได้ 2 แบบคือในแบบ ที่เรียกการทำงานจากภายในโปรแกรม และแบบที่เรียกการทำงานโดยฮาร์แวร์
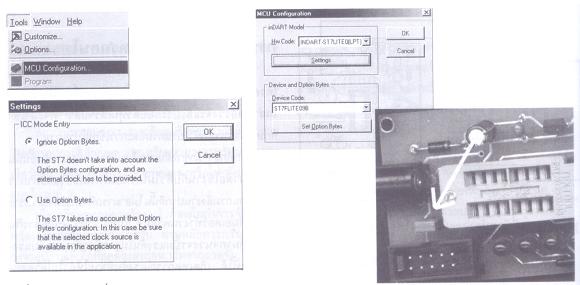
ในวงจรนี้เราจะใช้วงจรWatchdogที่ทำงานจากฮาร์แวร์ โดยทำการเซตจาก
Option Byte ดังรูปที่12
|