ขั้นตอนที่
4 ทำการนำขาของอุปกรณ์และแกนเหล็กของมอเตอร์มาประกอบบนแผ่นพลาสติกที่เตรียมไว้ดังรูปที่
7
ในการประกอบดังรูปที่
7 นี้ต้อง ล็อกน๊อตขนาด 3 มิลลิเมตรลงบนแกนมอเตอร์และลวดทองแดง อย่างแน่นหนาเพื่อไม่ให้เวลาทำงานเกิดความผิดพลาดจากแกนหลุด
หรือขาลวดอ่อน |
|
|
|
|
|
|
|
ขั้นตอนที่
5 ทำการประกอบลำตัวกับมอเตอร์ดังรูปที่ 8
ในรูปที่ 8 จะนำเส้นลวดเส้นที่
1 และ 2 มาทำการประกอบเป็นลำตัวหุ่นยนต์โดยเชื่อมต่อมอเตอร์กับเส้นลวดโดยใช้น๊อต
3 มิลลิเมตรและทำการตัดลวดขนาด 7 มิลลิเมตรเพื่อใช้เสริมเพื่อให้น๊อตวางได้พอดีตามรูปนะครับ |
|
|
|
|
|
|
|
ขั้นตอนที่
6 ทำการตัดแผ่นพลาสติกขนาดประมาณ กว้าง 8 มิลลิเมตรและยาว
20 มิลลิเมตรเพื่อใช้ติดตั้งสวิทช์ S1-S4 ตามรูปที่ 9
ในรูปที่ 9 เป็นการประกอบตัวสวิทช์เข้ากับตัวหุ่นยนต์โดยให้แผ่นพลาสติกชิดกับมอเตอร์เลยหรือเราอาจจะหาช่วงที่พอดีในการใช้มอเตอร์ที่แตกต่างกัน
เพราะตัวสวิตช์ที่ติดตั้งนี้จะเป็นจุดที่เราจะอนุญาติให้มอเตอร์ขับขาของหุ่นยนต์ให้เคลื่อนที่ได้มากหรือน้อย
ครับ |
|
|
|
|
|
|
|
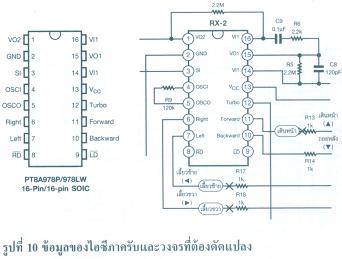
ลักษณะการทำงานของบอร์ดวิทยุรับส่ง
ในการใช้งานในบทความนี้เราจะใช้สัญญาณที่ทำการถอดรหัสออกมาเพียง
3 สัญญาณเท่านั้น คือ เดินหน้า เลี้ยวซ้าย เลี้ยวขวา ตามหมายเลข1,2 และ3
โดยถ้าดูในวงจรต้องทำการนำค่าความต้านทาน 1 K ทั้ง 3 ตำแหน่งตามรูปที่
10 ออก แล้วนำสัญญาณจากไอซีรถกระป๋องเข้าสู่ภาคประมวลผลโดยตรงได้เลย
การทำงานของไอซีรถกระป๋อง ในสถานะปรกติไม่มีการกดปุ่มใดๆที่ภาคส่ง สถานะที่ขาสัญญาณจะมีค่าเทียบเท่าศูนย์โวลท์
ถ้ามีการกดปุ่มที่ภาคส่งของรถกระป๋องสถานะที่ขาสัญญาณที่ต้องการใช้งานเช่น
ขาเดินหน้า ของไอซีภาครับนั้นจะมีไฟประมาณ 3.3 โวลท์หรือเทียบเท่าสถานะ1
เช่นถ้ามีการกดปุ่มเดินหน้าที่ภาคส่ง ที่ขา 11 หรือขาสัญญาณเดินหน้าของไอซีภาครับจะมีค่าเป็น
3.3 โวลท์หรือเทียบเท่า 1 ทันทีครับ เพื่อไม่ให้เราทำการเปลี่ยนแปลงวงจรพลาดให้ดูที่รูปจริงๆเลย
|
|
|
 |
|
|
|
|
|
|
|
 |
|
|
| |
|
|
|
|
|
|
| |
|
|
|
มีต่อ...  |
| |
|
|
|
|
|
|

