|
|
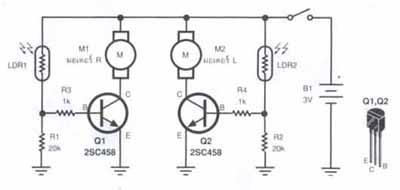
รายการอุปกรณ์
R1,R2 - 20 k ตัวต้านทานขนาด1/4
วัตต์ 5% 2 ตัว
LDR1,LDR2 - ตัวตรวจจับแสง 2
ตัว
IC1 - ไอซีเบอร์ ULN2003 1
ตัว
มอเตอร์ DC 3 โวลต์ ขนาดเล็ก 2
ตัว
ลูกยางเทป
3 ตัว
ถ่าน VARTA รุ่น CR123A หรือ Panasonic
1 ก้อน
สวิตซ์เลี่อน 1
ตัว
สายไฟ, ปืนกาว, กาวพลาสติก, ตะกั่ว เป็นต้น |


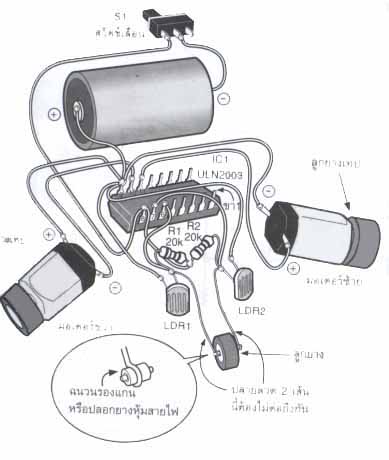 รูปที่
8 การเชื่อมต่ออุปกรณ์ต่าง ๆ
รูปที่
8 การเชื่อมต่ออุปกรณ์ต่าง ๆ