วิธีการเขียนโปรแกรมและโฟลชาร์ต
วิธีการเขียนโปรแกรม เราต้องกำหนดกรณีต่าง ๆ
หรือสิ่งที่เราอยากจะให้เจ้าตัวหุ่นยนต์ของเราทำ ซึ่งในที่นี้จะกำหนดกรณีแบบง่าย
ๆ ไม่ซับซ้อนดังนี้ครับ
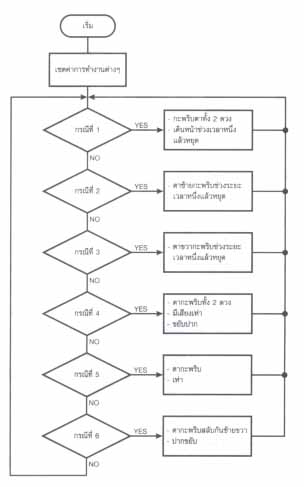
กรณีที่ 1 เมื่อมีการลูบที่บริเวณหัว
- ตากระพริบทั้ง 2ดวง
- เดินหน้าช่วงระยะเวลาหนึ่งแล้วหยุด
กรณีที่ 2 เมื่อมีการลูบจมูกซ้าย
- ตาซ้ายกระพริบช่วงระยะเวลาหนึ่ง แล้วหยุด
กรณีที่ 3 เมื่อมีการลูบจมูกขวา
- ตาขวากระพริบช่วงระยะเวลาหนึ่ง แล้วหยุด
กรณีที่ 4 เมื่อได้ยินเสียง
- ตากระพริบทั้ง 2 ดวง
- มีเสียงเห่า
- ขยับปาก
กรณีที่ 5 เมื่อไม่ได้รับแสง
- ตากระพริบ
- เห่า
กรณีที่ 6 เมื่ออุณหภูมิสูงเกินที่กำหนด
- ตากระพริบสลับกัน ซ้ายขวา
- ปากขยับ
ซึ่งเมื่อเราทำได้ทั้ง 6 กรณีนี้แล้ว แสดงว่าอุปกรณ์ทุกตัวทำงานครบทุกตัว
ดังนั้น เราสามารถนำสิ่งที่ได้มารวมกันแล้วตัดสินปัญหาต่าง ๆ
เสมือนนำทุกอย่างมารวมกันแล้วสั่งการทำงาน ซึ่งถ้าอยากให้หุ่นยนต์ที่เราสร้างขึ้นมามีชีวิต
เราก็ต้องพยายามฝึกเขียนโปรแกรมกันหน่อยก็แล้วกันนะครับ |