หลัการทำงานของวงจร
จากที่ผมได้กล่าวมาแล้ว วงจรต่าง ๆ ที่เราได้ออกแบบมานั้นจะถูกควบคุมโดยตัวไมโครคอนโทรลเลอร์ทั้งหมด
ซึ่งผมขอกล่าวหลักการโดยย่อก่อนครับ โดยเริ่มจาก C1, R1 เป็นวงจรที่ใช้รีเซตตัว
89C2051 ขา 4 และขา 5 จะถูกต่อโดยใช้คริสตอล 4 MHZ และต่ออยู่กับ
C2 และ C3 เพื่อเป็นฐานเวลาให้กับตัวไมโครคอนโทรลเลอร์ การต่อเพียงเท่านี้เราก็สามารถใช้งานไมโครคอนโทรลเลอร์ได้แล้วครับ
ก็เหลือเพียงแต่ต่อเพิ่มวงจรทางด้านรับข้อมูล และแสดงผลเท่านั้น
ดูส่วนการรับข้อมูลจะเริ่มจาก ภาครับเสียง R9จะเป็นตัวต้านทานที่ต่อไฟเลี้ยงให้กับคอนเดนเซอร์ไมโครโฟน
C5ทำหน้าที่ไม่ให้ไฟตรงผ่านเข้าสู่ตัวออปแอมป์ IC2/1 ให้ผ่านแต่สัญญาณเสียง
R11 และ R12 เป็นตัวปรับอัตราขยายสัญญาณเสียงให้มีค่ามากขึ้น เข้าสู่ที่ขา
8 โดยมี R14และ VR1 เป็นตัวปรับแรงดันอ้างอิง
ดังนั้นสัญญาณเสียงที่ขา 8 จะถูกเปรียบเทียบกับขา 9 โดย IC2/2
ทำหน้าที่เป็นวงจรเปรียบเทียบแรงดัน ถ้ามีสัญญาณเสียงมากเกินจุดที่เราต้องการจะเกิดมีค่าแรงดันที่เอาท์พุท
เป็นลอจิกต่ำ( 0 โวลท์) เพราะจะได้เข้ากันได้กับตัวคอนโทรลเลอร์ที่เราใช้นั่นเอง
และ R15 เป็นความต้านทานที่ใช้ต่อ Pull up ให้กับ IC 2/2
ต่อมาเรามาดูที่ส่วนภาคตัวจับแสงกันบ้างครับ ในส่วนนี้ R16 จะเป็นตัวแบ่งแรงดันกับ
LDR1 ซึ่งเป็นความต้านทานที่มีค่าเปลี่ยนแปลงตามแสงที่เข้ามา เข้าที่ขา6
ของ IC 2/3 โดยที่R17และ VR2 จะทำหน้าที่ปรับแรงดันอ้างอิงเข้าที่ขา
7 โดยถ้าเราต้องการตรวจจับแสงขนาดใด ก็ปรับที่ VR2 นั่นเอง และข้อมูลจะถูกเปรียบเทียบโดย
IC2/3 เมื่อแสงมืดเกินจุดที่เราตั้งไว้ที่ ขา7 ที่ขา1 จะเกิดแรงดัน
0 โวลท์
ในส่วนของภาคตรวจจับอุณหภูมิในที่นี้ขอใช้เบอร์ LM35 ซึ่งจะให้แรงดันขึ้นกับอุณหภูมิคือ
10 มิลลิโวลท์ต่อ 1 องศาเซลเซียส ซึ่งจะทำงานตรวจจับอุณหภูมิได้รวดเร็ว
แรงดันที่เกิดจากผลของอุณหภูมิจะเข้าที่ขา4 ของ IC2/4 และ R19,VR3
ทำหน้าที่เป็นตัวปรับแรงดันอ้างอิงเช่น เมื่อต้องการให้ตรวจจับอุณหภูมิที่35องศาเซลเซียส
แรงดันที่ขาของ LM35 จะมีค่า 350 มิลลิโวลท์ เราสามารถปรับที่
VR3ให้มีค่า 350 มิลลิโวลท์ เพียงเท่านี้เมื่ออุณหภูมิมีค่าถึง
35 องศาเซลเซียส ก็จะได้แรงดันที่ขา2 ของ IC2 ที่เกิดจากการเปรียบเทียบแรงดันเป็น
0 โวลท์นั่นเองครับ |
| |
|
ต่อไปจะพิจารณาภาคขับมอเตอร์โดยมี
TR6 TR7 TR8 TR9 TR10 TR11 ทำงานเป็นวงจรสวิตซ์ เพื่อสามารถให้มอเตอร์หมุนซ้าย
หมุนขวาได้ตามค่าแรงดันที่เข้ามาเป็นลอจิก ที่จุด P1 และ P2 วงจรการทำงานอาจจะคุ้นเคยมาแล้ว
นักอิเล็กทรอนิกส์ที่เคยโมดิฟายรถกระป๋อง ซึ่งอาจจะหาอ่านหลักการที่สมบูรณ์ได้จากหนังสือ
HOBBY ELECTRONICSฉบับที่ 117 มกราคม 2545 ซึ่งเราจะควบคุมการทำงานของมอเตอร์จากขา
P3.4 และP3.5 ของไมโครคอนโทรลเลอร์ เบอร์ 89C2051
ภาครับและภาคส่งอินฟาเรด จะเป็นการทำงานแบบง่าย ๆ อาศัยหลักการสะท้อนของแสงอินฟาเรด
ซึ่งในที่นี้ได้ออกแบบให้ TR2 เป็นตัวเชื่อมต่อวงจรเมื่อได้รับแรงดันลอจิกจากขา
P3.7 ในการเปิดปิด LED ส่งอินฟาเรด ซึ่งจะส่งแสงอินฟาเรดอ่อน ๆ
เพราะเราต้องการให้มีการสัมผัสกับหุ่นยนต์ที่เราได้ออกแบบขึ้น
ในส่วนของภาครับโดยปกติที่ไม่ได้รับแสงจะมีลอจิกสูงเกิดขึ้นที่ขาคอเลคเตอร์ที่
TR3,TR4 และ TR5 ซึ่งจะถูกต่อเข้าที่ขา P1.7 , P1.6 และ P1.5 ตามลำดับ
เมื่อภาครับตัวได ได้รับแสงอินฟาเรดจะทำให้ทานซิสเตอร์ในส่วนของภาครับนั้นทำงานและจะมีค่าข้อมูลเป็นลอจิกต่ำออกมาเพื่อให้ไมโครคอนโทรลเลอร์รับรู้
ภาคแสดงผลดวงตาของหุ่นยนต์ใช้ L1 และ L2ต่อเป็นลักษณะที่จะสว่างเมื่อที่ขา
P3.2 และ P3.3 เป็น 0 โวลท์ และจะดับเมื่อขา P3.2 และ P3.3เป็น
4.5 โวลท์ โดยสามารถควบคุมการกระทำดังกล่าวจากตัวไมโครคอนโทรลเลอร์
และสุดท้ายเราจะใช้ส่วนของภาคกำเนิดเสียงที่มากับของเล่นชิ้นนี้มาทำงานโดยจะต่อไฟบวกเข้ากับขั่วบวกของแผ่นวงจรเสียง
สังเกตจากค่าตัวเก็บประจุที่ต่อคร่อมบนแผ่นวงจรและขั้วลบจะต่อลงที่ขา
P3.0 เมื่อ P3.0 เป็น4.5 โวลท์ ภาคผลิตเสียงนี้จะไม่ทำงาน และจะทำงานเมื่อขาP3.0
เป็น 0 โวลท์ เราจะใช้ขา P3.0 นี้เป็ฯตัวรับกระแส ซึ่งตัวไมโครคอนโทรลเลอร์นี้สามารถใช้ขา
P3.0 นี้รับกระแสได้ประมาณ 20 มิลลิแอม ซึ่งก็เพียงพอสำหรับการแสดงผลภาคนี้ |
|
|
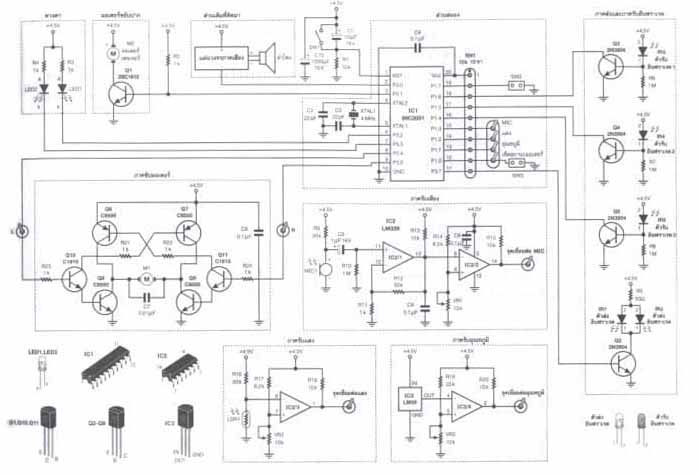 รูปที่ 5 วงจรการทำงาน
รูปที่ 5 วงจรการทำงาน
|
| |
มีต่อ...  |
|

